
- English
- Español
- Português
- русский
- Français
- 日本語
- Deutsch
- tiếng Việt
- Italiano
- Nederlands
- ภาษาไทย
- Polski
- 한국어
- Svenska
- magyar
- Malay
- বাংলা ভাষার
- Dansk
- Suomi
- हिन्दी
- Pilipino
- Türkçe
- Gaeilge
- العربية
- Indonesia
- Norsk
- تمل
- český
- ελληνικά
- український
- Javanese
- فارسی
- தமிழ்
- తెలుగు
- नेपाली
- Burmese
- български
- ລາວ
- Latine
- Қазақша
- Euskal
- Azərbaycan
- Slovenský jazyk
- Македонски
- Lietuvos
- Eesti Keel
- Română
- Slovenski
- मराठी
- Srpski језик

Een artikel om het verschil tussen stappenmotoren en servo's en servomotoren te begrijpen
I. Verschillen tussen stappenmotoren en servo's en servomotoren
Stappenmotor: is het elektrische pulssignaal in hoekverplaatsing of lijnverplaatsing van de stappenmotoronderdelen met open lus. Simpel gezegd vertrouwt het op het elektrische pulssignaal om de hoek en het aantal windingen te regelen. Hij vertrouwt dus alleen op het pulssignaal om te bepalen hoeveel rotatie. Omdat er geen sensor aanwezig is, kan de remhoek afwijken. Het precieze pulssignaal minimaliseert de afwijking echter.
Servomotor: vertrouw op het servobesturingscircuit om de snelheid van de motor te regelen, via de sensor om de rotatiepositie te regelen. De positiecontrole is dus zeer nauwkeurig. En ook het toerental is variabel.
Servo (elektronische servo): Het hoofdbestanddeel van de servo is de servomotor. Het bevat een servomotorregelcircuit + reductietandwielset. Oh ja, de servomotor heeft geen reductietandwiel. En de servo heeft een reductietandwielset.
In het geval van een begrenzingsservo vertrouwt deze op een potentiometer onder de uitgaande as om de stuurhoek van de roerarm te bepalen. De servosignaalbesturing is een pulsbreedtegemoduleerd (PWM) signaal, waarbij een microcontroller dit signaal eenvoudig kan genereren.
II. Basisprincipe stappenmotor
Hoe het werkt:
Normaal gesproken is de rotor van een motor een permanente magneet, en wanneer er stroom door de statorwikkelingen vloeit, produceren de statorwikkelingen een magnetisch vectorveld. Dit magnetische veld zal de rotor ertoe aanzetten om over een hoek te roteren, zodat de richting van het paar magnetische velden van de rotor hetzelfde zal zijn als de richting van het magnetische veld van de stator. Wanneer het vectormagnetische veld van de stator over een hoek roteert. Met dit magnetische veld draait de rotor ook een hoek rond. Voor elke elektrische ingangspuls draait de motor één hoekstap vooruit. De uitgangshoekverplaatsing is evenredig met het aantal ingangspulsen, en de rotatiesnelheid is evenredig met de frequentie van de pulsen. Door de volgorde te veranderen waarin de wikkelingen worden bekrachtigd, keert de motor om. Daarom kan het aantal en de frequentie van de pulsen en de volgorde van het bekrachtigen van de wikkelingen van elke fase van de motor worden geregeld om de rotatie van de stappenmotor te regelen.
Principe van warmteopwekking:
Meestal zie je allerlei soorten motoren, intern zijn ijzeren kern en wikkelspoel. Wikkelweerstand, vermogen zal verlies veroorzaken, verliesgrootte en weerstand en stroom zijn evenredig met het kwadraat, wat vaak koperverlies wordt genoemd. Als de stroom niet de standaard DC- of sinusgolf is, zal dit ook harmonisch verlies veroorzaken; kern heeft hysteresis wervelstroomeffect, in het wisselende magnetische veld zal ook verlies veroorzaken, de grootte van het materiaal, stroom, frequentie, spanning gerelateerd, wat ijzerverlies wordt genoemd. Koperverlies en ijzerverlies zullen zich manifesteren in de vorm van warmteontwikkeling, waardoor de efficiëntie van de motor wordt beïnvloed. Stappenmotoren streven over het algemeen naar positioneringsnauwkeurigheid en koppeloutput, de efficiëntie is relatief laag, de stroom is over het algemeen groter en de harmonische componenten zijn hoog, de frequentie van de stroom wisselt met de snelheid en verandering, dus stappenmotoren hebben over het algemeen een hittesituatie en de situatie is ernstiger dan de algemene AC-motor.
III. Roer constructie
De servo bestaat hoofdzakelijk uit een behuizing, een printplaat, een aandrijfmotor, een tandwielreductor en een positiedetectie-element. Het werkingsprincipe is dat de ontvanger een signaal naar de servo stuurt, en de IC op de printplaat de kernloze motor aanzet om te gaan draaien, en het vermogen via de reductiekast naar de zwenkarm wordt overgebracht, en tegelijkertijd stuurt de positiedetector een signaal terug om te bepalen of de positionering is bereikt of niet. De positiedetector is eigenlijk een variabele weerstand. Wanneer de servo draait, verandert de weerstandswaarde dienovereenkomstig en kan de rotatiehoek bekend worden door de weerstandswaarde te detecteren. De algemene servomotor is een dunne koperdraad die rond een driepolige rotor is gewikkeld. Wanneer de stroom door de spoel vloeit, wordt er een magnetisch veld gegenereerd en de omtrek van de rotormagneet produceert afstoting, die op zijn beurt de rotatiekracht genereert. Volgens de natuurkunde is het traagheidsmoment van een object recht evenredig met zijn massa, dus hoe groter de massa van het te roteren object, hoe groter de vereiste kracht. Om een hoge rotatiesnelheid en een laag stroomverbruik te bereiken, is de servo gemaakt van dunne koperdraden die in een zeer dunne holle cilinder zijn gedraaid, waardoor een zeer lichtgewicht holle rotor zonder polen ontstaat, en zijn er magneten in de cilinder geplaatst, de holle kopmotor.
Om aan verschillende werkomgevingen te voldoen, zijn er servo's met waterdichte en stofdichte ontwerpen; en als reactie op verschillende belastingsvereisten zijn er plastic en metalen tandwielen voor servo's, en metalen tandwielen voor servo's hebben over het algemeen een hoog koppel en hoge snelheid, met als voordeel dat de tandwielen niet kapot gaan als gevolg van overmatige belastingen. Servo's van hogere kwaliteit zullen worden uitgerust met kogellagers om de rotatie sneller en nauwkeuriger te maken. Er is een verschil tussen één kogellager en twee kogellagers, uiteraard zijn de twee kogellagers beter. De nieuwe FET-servo's maken voornamelijk gebruik van FET (Field Effect Transistor), wat het voordeel heeft van een lage interne weerstand en daardoor minder stroomverlies dan normale transistors.
IV. Servo-werkingsprincipe
Van de pwm-golf naar het interne circuit om een voorspanning te genereren, stuurt de contactorgenerator via het reductietandwiel de potentiometer aan om te bewegen, zodat wanneer het spanningsverschil nul is, de motor stopt om het effect van servo te bereiken.
De protocollen voor servo-PWM's zijn allemaal hetzelfde, maar de nieuwste servo's kunnen verschillen.
Het protocol is over het algemeen: hoge breedte in 0,5 ms ~ 2,5 ms om de servo te besturen om door verschillende hoeken te draaien.
V. Hoe servomotoren werken
De onderstaande afbeelding toont een servomotorbesturingscircuit gemaakt met een operationele vermogensversterker LM675, en de motor is een DC-servomotor. Zoals uit de figuur blijkt, wordt de operationele versterker LM675 geleverd door 15V, en wordt de 15V-spanning toegevoegd aan de in-fase-ingang van de operationele versterker LM675 via RP 1, en wordt de uitgangsspanning van de LM675 toegevoegd aan de ingang van de servomotor. De motor is uitgerust met een snelheidsmeetsignaalgenerator voor real-time detectie van het motortoerental. In feite is de snelheidssignaalgenerator een soort generator en de uitgangsspanning is evenredig met de rotatiesnelheid. De uitgangsspanning van de snelheidsmeetsignaalgenerator G wordt na een spanningsdelerschakeling als een snelheidsfoutsignaal teruggevoerd naar de inverterende ingang van de operationele versterker. De door de snelheidscommandopotentiometer RP1 ingestelde spanningswaarde wordt opgeteld bij de in-fase-ingang van de operationele versterker na spanningsdeling door R1.R2, wat equivalent is aan de referentiespanning.
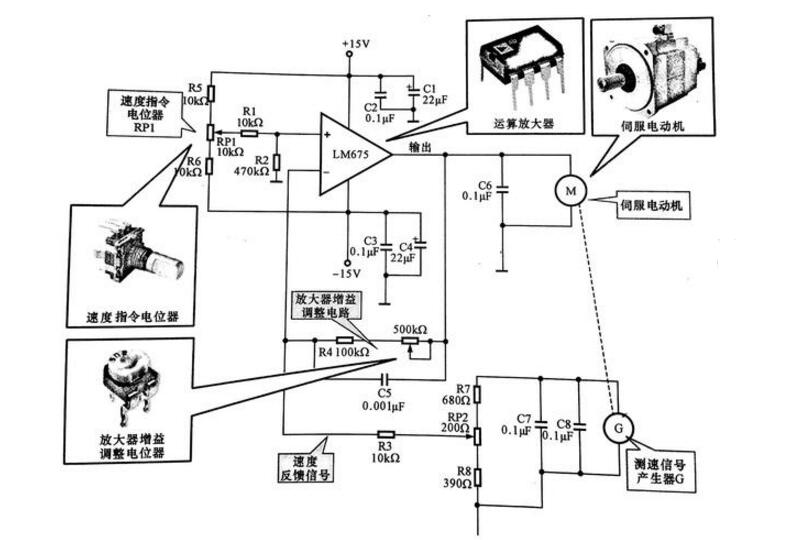
Besturingsschema van servomotor
Servomotor: Aangegeven door de letter M voor servomotor, is dit de krachtbron voor het aandrijfsysteem. Operationele versterker: aangegeven met de circuitnaam, d.w.z. LM675, is een versterkeronderdeel in het servobesturingscircuit dat de aandrijfstroom voor de servomotor levert.
Potentiometer voor snelheidscommando RP1: Stelt de referentiespanning van de operationele versterker in het circuit in, d.w.z. snelheidsinstelling. Potentiometer voor versterkerversterking RP2: Wordt in het circuit gebruikt om respectievelijk de versterkerversterking en de grootte van het snelheidsfeedbacksignaal nauwkeurig af te stemmen.
Wanneer de belasting van de motor verandert, verandert ook de spanning die wordt teruggevoerd naar de geïnverteerde ingang van de operationele versterker, dat wil zeggen wanneer de belasting van de motor wordt verhoogd, neemt de snelheid af en neemt ook de uitgangsspanning van de snelheidssignaalgenerator af, zodat de spanning aan de geïnverteerde ingang van de operationele versterker afneemt, en het verschil tussen deze spanning en de referentiespanning toeneemt, en de uitgangsspanning van de operationele versterker toeneemt. Omgekeerd, wanneer de belasting kleiner wordt en het motortoerental toeneemt, stijgt de uitgangsspanning van de snelheidsmeetsignaalgenerator, neemt de feedbackspanning toegevoegd aan de omgekeerde ingang van de operationele versterker toe, neemt het verschil tussen deze spanning en de referentiespanning af, neemt de uitgangsspanning van de operationele versterker af en neemt het motortoerental dienovereenkomstig af, zodat de rotatiesnelheid automatisch op de ingestelde waarde kan worden gestabiliseerd.
Stuur onderzoek



X
We gebruiken cookies om u een betere browse-ervaring te bieden, het siteverkeer te analyseren en de inhoud te personaliseren. Door deze site te gebruiken, gaat u akkoord met ons gebruik van cookies.
Privacybeleid